
1、局部坐标系
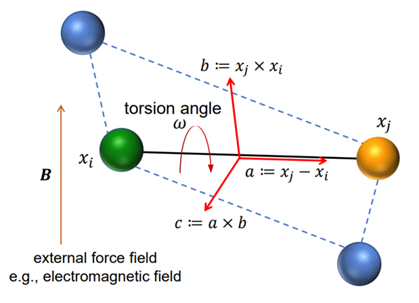
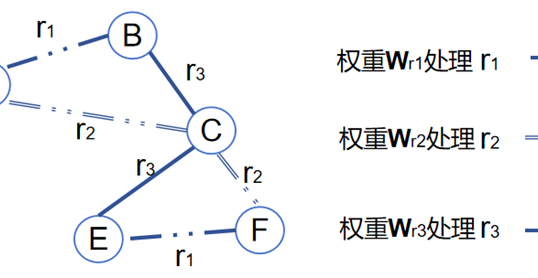
ClofNet的作者指出,在传统的等变几何GNN表征框架中(例如EGNN),通常只考虑了原子或粒子之间的相对位置来描述它们的相互作用,这种方法并没有考虑到外部条件,如恒定电场对粒子间相互作用的影响。在一个恒定电场中,电场对粒子的作用是一个固定方向的向量,这对所有粒子都是一样的,并且与它们的相对位置无关。因此,ClofNet提出了局域坐标系的解决方案,这个坐标系不仅能够捕捉粒子间的相对位置,还能够包含其他的物理因素,如电场方向,局域坐标系具体的定义方法如图1所示。
如图1所示,考虑了一个多体系统中的两体子系统\((x_i,x_j)\),这个系统不随时间变化,可以被看作是一个具有两个节点和一条边的图。一般而言,两个粒子间的相互作用函数可以分解成两部分:\(U\left(x_{i},x_{j}\right):=U_{\mathrm{in}}\left(\parallel x_{i}-x_{j}\parallel\right)+U_{\mathrm{ext}}\left(x_{i},x_{j}\right)\) ,其中第一部分是相对距离\(\left|x_i-x_j\right|\)的函数(例如电静力),第二部分描述了可能取决于相对距离和角度(例如电磁场、扭力)的外部力场的影响。因此,\(U_{\mathrm{ext}}\left(x_i,x_j\right)\)的梯度可以沿着任意方向在3D空间中发散。大多数几何GNN方法在处理这种力预测问题时,都是通过采用不变特征(例如,相对距离)作为输入,并表示沿径向的力,即\(F_{i}=k\left(x_{i}-x_{j}\right)\),这在梯度\(\nabla U_{\mathrm{ext}}(x_i,x_j)\)不是沿着径向时是不够的。为了解决这个问题,clofNet提出了一个正交的等变局部坐标系框架(一种正交基组),用于构建和表示几何数据更完备的局部结构。具体来说,取\(x_{i}-x_{j}\)作为第一个分量/方向\(\mathrm{a}\),然后\(x_i\times x_j\)作为第二方向\(\mathrm{b}\)。最后,前两个方向的叉积被作为第三方向\(\mathrm{c}\)。这三个向量\(\mathrm{a}\),\(\mathrm{b}\)和\(\mathrm{c}\) 定义了一个局部坐标系,由于叉乘的性质,\(\mathrm{b}\)垂直于\(\mathrm{a}\),\(\mathrm{c}\)垂直于\(\mathrm{a}\)和\(\mathrm{b}\) 。换句话说,这个坐标系具有正交性。
2、clofNet模型总体架构
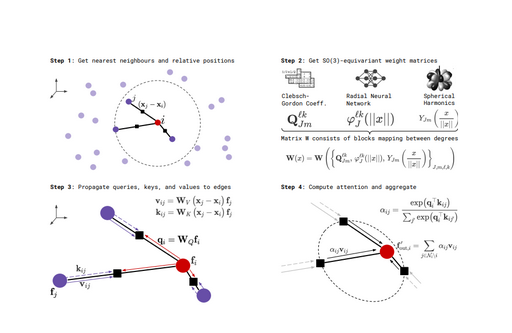
clofNet模型处理数据的流程可以分为中心化(Centralization)、局部完备框架(Complete Frame)、标量化(Scalarize)、消息传递模块(GMP)、向量化(Vectorize)和迭代更新六个步骤,如图2所示。
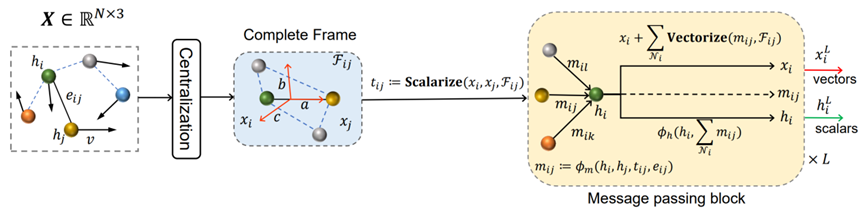
针对输入数据,模型首先将每个点的位置进行中心化处理。这通常意味着会从每个位置向量中减去所有位置向量的平均值,以确保模型对平移保持不变。这是因为通过减去所有点位置向量的平均值,实际上是在重新定位整个系统的中心(质心)到原点(坐标系的中心)的距离。这样,模型就不会将任何特定的位置作为参考点,因此无论系统在空间中如何平移,模型的输出都将保持不变。
局部完备框架\(\mathcal{F}_{ij}\)就是上一小节解释的局部正交坐标系。具体来说,令\(a_{ij}^{t}=\frac{x_{i}(t)-x_{j}(t)}{\begin{Vmatrix}x_{i}(t)-x_{j}(t)\end{Vmatrix}}\),则可以定义\(b_{ij}^{t}=\frac{x_{i}(t)\times x_{j}(t)}{\left|x_{i}(t)\times x_{j}(t)\right|}\)和\(c_{ij}^t=a_{ij}^t\times b_{ij}^t\)。这三个相互正交的基组可以构建一个\(SO(3)\)-等变框架\(\mathcal{F}{ij}:\mathrm{EquiFrame}\left(x_{i},x_{j}\right)=\left(a_{ij}^{t},b_{ij}^{t},c_{ij}^{t}\right)\)。实际操作中,我们添加一个小常数\(\epsilon\)到归一化因子中,以防\(x_{i}\)和\(x_{j}\)发生重合。
基于上述的局部完备框架\(\mathcal{F}_{ij}\),可以将任意几何向量转换为\(SO(3)\)不变的标量值。具体方法是将几何向量投影到\(\mathcal{F}_{ij}\)的基组上,通过内积获得相应的系数,这些系数是不变标量,表示为\(t_{ij}=\left(x_{i}\cdot a_{ij}^{t},x_{i}\cdot b_{ij}^{t},x_{i}\cdot c_{ij}^{t}\right)\),这就是几何向量标量化的步骤。
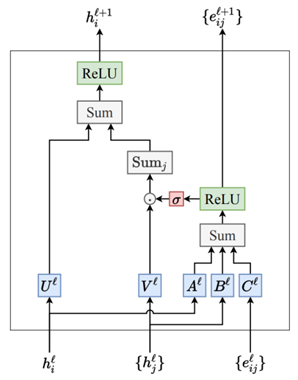
接下来,\(t_{ij}\)将与节点特征向量\(h_{i},h_{j}\)和边特征向量\(e_{ij}\)一起作为消息传递模块(GMP)的输入信息。GMP分为特征编码和信息传递两个信息处理阶段,特征编码阶段的处理非常简单,几何标量\(t_{ij}\)、节点特征\(h_{i},h_{j}\)和边特征\(e_{ij}\)分别经过神经网络层的处理,学习映射得到更新后的新特征表示。
在信息传递阶段,clofNet提出了朴素的消息传递和基于注意力的消息传递两种不同的机制。朴素的消息传递机制非常类似与模型EGNN。具体来说,将几何标量\(t_{ij}\)、节点特征\(h_{i},h_{j}\)和边特征\(e_{ij}\)同时作为一个神经网络层\(\phi_{_m}\)的输入,进行节点特征、边特征和几何特征之间的信息融合,计算得到新的特征向量\(m_{ij}\),这个特征向量代表目标节点\(\mathrm{i}\)和其邻居\(\mathrm{j}\)之间的相互作用关系。因此,目标节点\(\mathrm{i}\)的特性更新方式就是对所有的邻居\(\mathrm{j}\)和其自身信息进行求和,并经过另一个神经网络层\(\phi_{h}\)计算得到,公式表示为:
\(\boldsymbol{m}_{ij}=\phi_{m}\left(s_{ij},\boldsymbol{h}_{i},\boldsymbol{h}_{j},\boldsymbol{e}_{ij}\right)
\)
\(\boldsymbol{h}_i^{l+1}=\phi_h\left(\boldsymbol{h}_i^l,\sum_{j\in\mathcal{N}(i)}\boldsymbol{m}_{ij}\right)\)
此外,与EGNN相似,clofNet也会对节点\(\mathrm{i}\)的位置信息\(x_{i}\)进行更新;不同的是EGNN的更新方式是直接基于笛卡尔坐标的,而clofNet的更新方式是基于局部坐标系 的,其公式表示为:
\(\mathcal{F}_{ij}^{l+1}=\mathrm{EquiFrame}\left(x_i^l,x_j^l\right)\)
\(\boldsymbol{x}_{i}^{l+1}=\boldsymbol{x}_{i}^{l}+\frac{1}{N}\sum_{j\in\mathcal{N}(x_{i})}\mathrm{Vectorize}\left(\boldsymbol{m}_{ij}^{l},\mathcal{F}_{ij}^{l}\right)\)
其中有个关键性操作:向量化,这是标量化的逆操作。具体来说,对于某个位置几何向量\(\mathrm{x}\)在等变框架下的标量化表示\({x^{a},x^{b},x^{c}}\),我们可以使用这些标量分量与基向量的线性组合重构原始向量,即\(x=x^{a}a+x^{b}b+x^{c}c\)。 这对于从简化的标量表示中恢复复杂的几何结构至关重要,让GMP模块的输出能够直接反映出原始空间中的向量性质,并保持在\(SO(3)\)群下的不变性。在上述公式中,\(x_i^{l+1}\)和\(h_{i}^{l+1}\)便是GMP模块输出的几何向量信息和节点标量信息。
至于消息传递的另一种机制:基于注意力的机制。其灵感主要源于Transformer算法中的Self-attention机制,公式表示如下:
\(\boldsymbol{q}_{i}=\phi_{q}\left(h_{i}^{\prime}\right),\boldsymbol{k}_{ij}=\phi_{k}\left(h_{i}^{\prime},m_{ij}\right),\boldsymbol{v}_{ij}=\phi_{\nu}\left(m_{ij}\right)\)
\(\alpha_{ij}=\frac{\left\langle q_i,k_{ij}\right\rangle}{\sum_{j^{^{\prime}}\in\mathcal{N}(i)}\left\langle q_i,k_{ij}\right\rangle}\)
\(\mathcal{M}_i=\mathrm{LayerNorm}\left(\sum_{j\in\mathcal{N}(i)}\alpha_{ij}\boldsymbol{v}_{ij}\right)\)
\(h_i^{l+1}=\phi_h\left(h_i^l,\mathcal{M}_i\right)\)
\(h_i^{l+1}=h_i^l+\mathrm{LayerNorm}\left(h_i^{l+1}\right)\)
其中:
(1)\(q_{i}\)是查询向量,它由一个多层感知机\(\phi_{q}\)对节点\(\begin{array}{c}{i}\end{array}\)的特征\(h_{i}^{l}\)进行转换得到。
(2)\(k_{ij}\)是键向量,由\(\phi_{k}\)对节点\(\begin{array}{c}{i}\end{array}\)的特征和边\(\text{ij}\)的消息\(m_{ij}\)进行转换得到。
(3) \(v_{ij}\)是值向量,由\(\phi_{v}\)对边\(\text{ij}\)的消息进行转换得到。
(4)\(\alpha_{ij}\)是注意力权重,通过\(q_{i}\)和\(k_{ij}\)的点积计算,然后通过Softmax标准化以确保所有邻居的权重和为1。
(5)\(\mathcal{M}_{i}\)是通过加权求和所有邻居\(\mathrm{j}\)的值向量 \(v_{ij}\)得到的,权重由\(\alpha_{ij}\)给出。
(6)\(h_i^{l+1}\)是新的节点特征,由\(\phi_{h}\)通过结合旧的节点特征和消息汇总\(\mathcal{M}_{i}\)计算得到。
(7)最后,\(h_i^{l+1}\)通过残差连接和层归一化(LayerNorm)更新,以提高训练的稳定性和效率。
注意力机制允许模型集中于最重要的信息,即在图中某个节点的所有邻居中,哪些邻居提供了最重要的信息。这种方法借鉴了Transformer模型在自然语言处理中的成功经验,并将其适用于学习粒子间的复杂相互作用。通过这种方式,ClofNet能够对多体系统进行更精细和灵活的建模。
作者
arwin.yu.98@gmail.com
相关文章
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}